Navigate
unterLinks
s t e u e r u n g
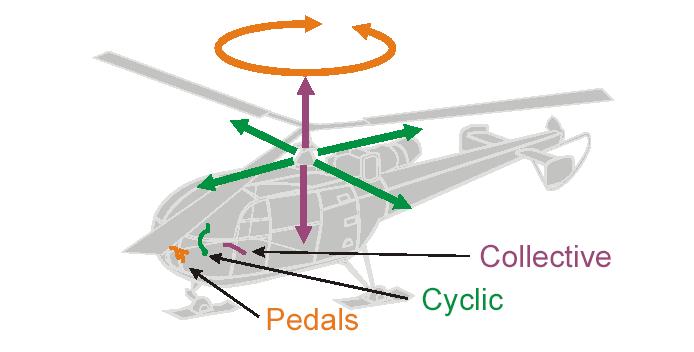
Ein Hubschrauber wird mit drei unterschiedlichen Steuern gesteuert. Der Steuerknüppel, oder auch Cyclic genannt wird im Schwebeflug verwendet um den Hubschrauber nach links, rechts, vorne oder hinten zu bewegen. Im Vorwärtsflug werden durch den Cyclic die Kurven oder das Steigen und Sinken eingeleitet. Mit den Pedalen kann der Hubschrauber um die eigene Achse an Ort gedreht werden und mit dem Collectiv steuert der Pilot das Steigen und Sinken im Schwebeflug und zusammen mit dem Cyclic die Geschwindigkeit im Vorwärtsflug.
Bei jedem Hubschrauber wird der Steuerknüppel mit der rechten Hand und die Collective mit der Linken Hand bedient. Die Füße werden gebraucht um über die Pedale den Heckrotor zu steuern. Wegen der Instabilität eines Hubschraubers darf der Cyclic im Flug nicht losgelassen werden, es sei denn der Hubschrauber mit einem automatischen Stabilisierungssystem ausgerüstet.
Sobald der Pilot am Collective nach oben zieht, wird der Anstellwinkel aller Rotorblätter um den gleichen Betrag erhöht. Dadurch nimmt der Gesamtauftrieb zu und der Helikopter beginnt zu steigen. Sinngemäß verringert sich der Anstellwinkel, wenn der Pilot den Collective nach unten drückt.
Wird der Cyclic nach vorne gedrückt, wird der Anstellwinkel der Rotorblätter während einer Umdrehung kontinuierlich geändert. Durch den unterschiedlichen Auftrieb wir die Rotorblattebene nach vorne geneigt. Selbstverständlich neigt sich die Ebene nach hinten, sobald der Pilot den Cyclic nach hinten zieht.
Dasselbe wie oben beschrieben geschieht, wenn der Pilot den Cyclic entweder nach rechts oder nach links drückt.
Mit den Pedalen wird der Anstellwinkel aller Heckrotorblättern um den gleichen Betrag verstellt (ähnlich der Collectiven Blattverstellung am Hauptrotor). Dadurch erhöht oder verringert sich der Heckrotorschub.
Die ganze Sache mit der Steuerung hat nur einen kleinen Hacken. Sobald der Pilot an einem der drei Steuer etwas verändert, muss er an den beiden Anderen ebenfalls korrigieren. Wie wir wissen, muss der Pilot am Collective ziehen wenn er im Schwebeflug etwas steigen will. Dies bewirkt nun, dass durch den größeren Anstellwinkel der Rotorblätter (und dadurch erhöhter Luftwiderstand) das Drehmoment zunimmt. Dadurch beginnt sich der Hubschrauber um die Hochachse zu drehen, was nur mit einer Korrektur am Heckrotor verhindert werden kann. Da nun der Heckrotor einen größeren seitlichen Schub liefert, wird auch die seitliche Versetzung des Hubschraubers vergrößert, was wiederum nur mit einer Korrektur am Cyclic ausgeglichen werden kann. Man könnte meinen, dass sicher der Hubschrauber nun in einem stabilen Schwebeflug befindet. Dem ist leider nicht so. Wegen den äußeren Einflüssen (vor allem Wind) und den nicht konstanten Verwirbelungen rund um den Hubschrauber muss der Pilot immer an allen Steuern korrigieren um einen stabilen Schwebeflug zu halten. Die große Schwierigkeit besteht darin all diese kleinen Korrekturen richtig zu koordinieren. Erst wenn ein Pilotenschüler nicht mehr studieren muss an welchem Steuer er nun korrigieren soll, kann er den Helikopter in einem oder weniger stabilen Schwebeflug halten. Und um diesen Automatismus ein zu trainieren braucht es einige Zeit (und einige Schweißtropfen).
{kind=link}